Темы кодификатора ЕГЭ: виды механического движения, скорость.
Равномерное прямолинейное движение материальной точки – это движение с постоянной скоростью . Обратите внимание, что речь идёт о постоянстве вектора скорости; это значит, что скорость неизменна как по модулю, так и по направлению.
Траекторией тела при равномерном прямолинейном движении служит прямая (или часть прямой – например, отрезок или луч). Вдоль данной прямой тело движется равномерно, то есть с постоянной по модулю скоростью.
Закон движения.
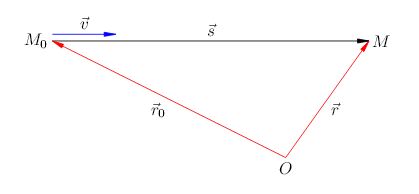
Предположим, что тело, двигаясь равномерно и прямолинейно со скоростью , переместилось за время
из точки
в точку
(рис. 1). Вектор перемещения есть
.
 |
| Рис. 1. Равномерное прямолинейное движение |
Путь, пройденный телом, равен длине вектора перемещения. Очевидно, что выполнено соотношение:
, (1)
где – модуль вектора скорости.
Формула (1) справедлива для любого равномерного движения (не обязательно прямолинейного). Но в случае прямолинейного равномерного движения эта формула становится соотношением между векторами. В самом деле, поскольку векторы и
сонаправлены, формула (1) позволяет записать:
(2)
Как обычно, движение тела рассматривается в некоторой системе отсчёта, связанной с телом отсчёта (рис. (1); координатные оси не изображаем). Пусть
– радиус-вектор начальной точки
и
– радиус-вектор конечной точки
. Тогда, очевидно,
. Подставим эту разность в формулу (2):
.
Отсюда получаем закон движения, то есть зависимость радиус-вектора тела от времени:
. (3)
Закон движения решает основную задачу механики, то есть позволяет найти зависимость координат тела от времени. Делается это просто.
Координаты точки обозначим (
). Они же являются координатами вектора
. Координаты точки
(и вектора
) обозначим
. Тогда векторная формула (3) приводит к трём координатным соотношениям:
(4)
(5)
(6)
Формулы (4)-(6) представляют координаты тела как функции времени и потому служат решением основной задачи механики для равномерного прямолинейного движения.
Интегрирование.
Ключевая формула (3), описывающая равномерное прямолинейное движение, может быть получена из несколько иных соображений. Вспомним, что производная радиус-вектора есть скорость точки:
(7)
В случае равномерного прямолинейного движения имеем . Что нужно продифференцировать, чтобы получить постоянный вектор
? Очевидно, функцию
. Но не только: к величине
можно прибавить любой постоянный вектор
(это не изменит производную, поскольку производная константы равна нулю). Таким образом:
(8)
Каков смысл константы ? Если
, то радиус-вектор
равен своему начальному значению
. Поэтому, полагая
в формуле (8), получим:
.
Итак, вектор есть начальное значение радиус-вектора, и теперь из (8) мы снова приходим к формуле (3):
.
Мы, таким образом, проинтегрировали равенство (7) при условии, что . Интегрирование – это операция, обратная дифференцированию. Интегрировать в физике приходится на каждом шагу, так что привыкайте 🙂